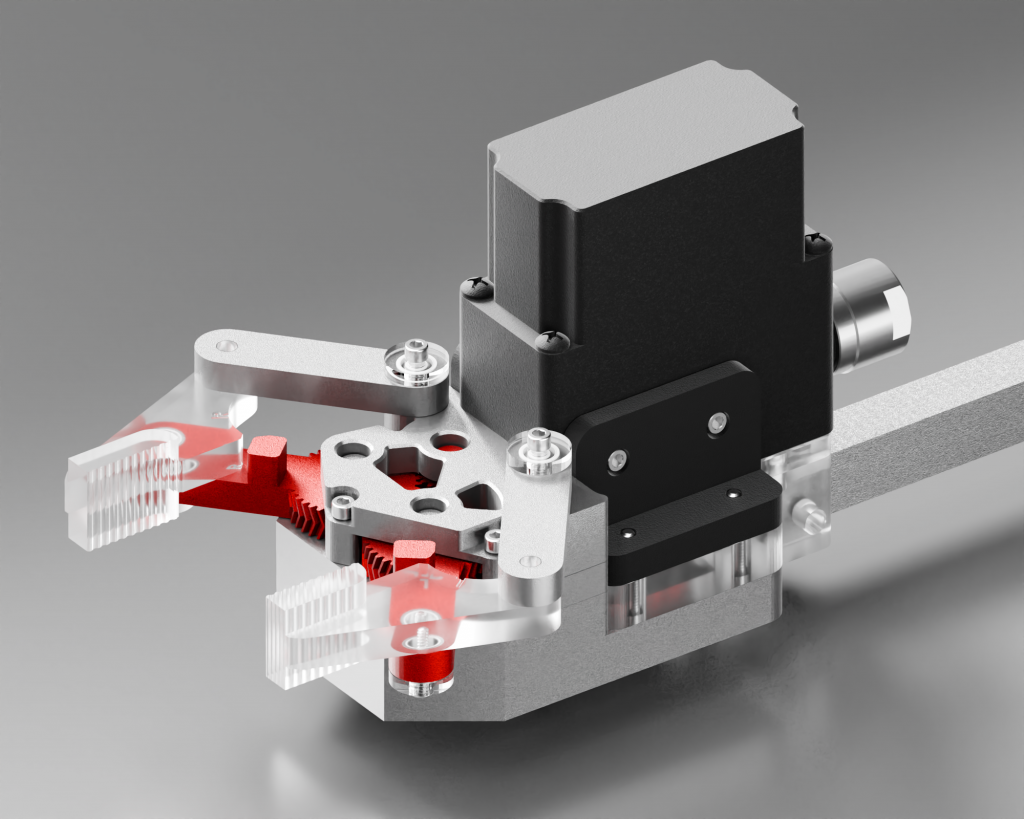
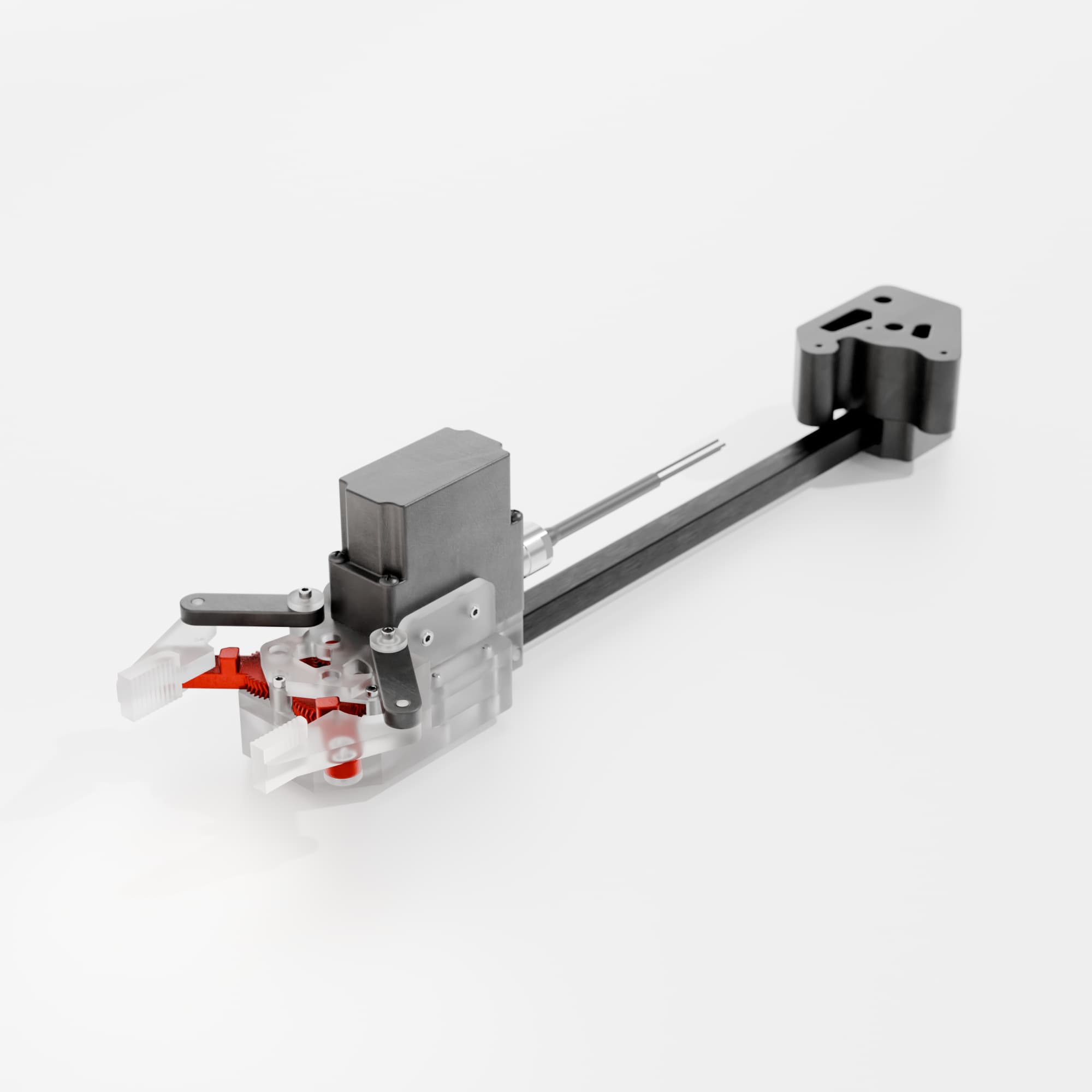
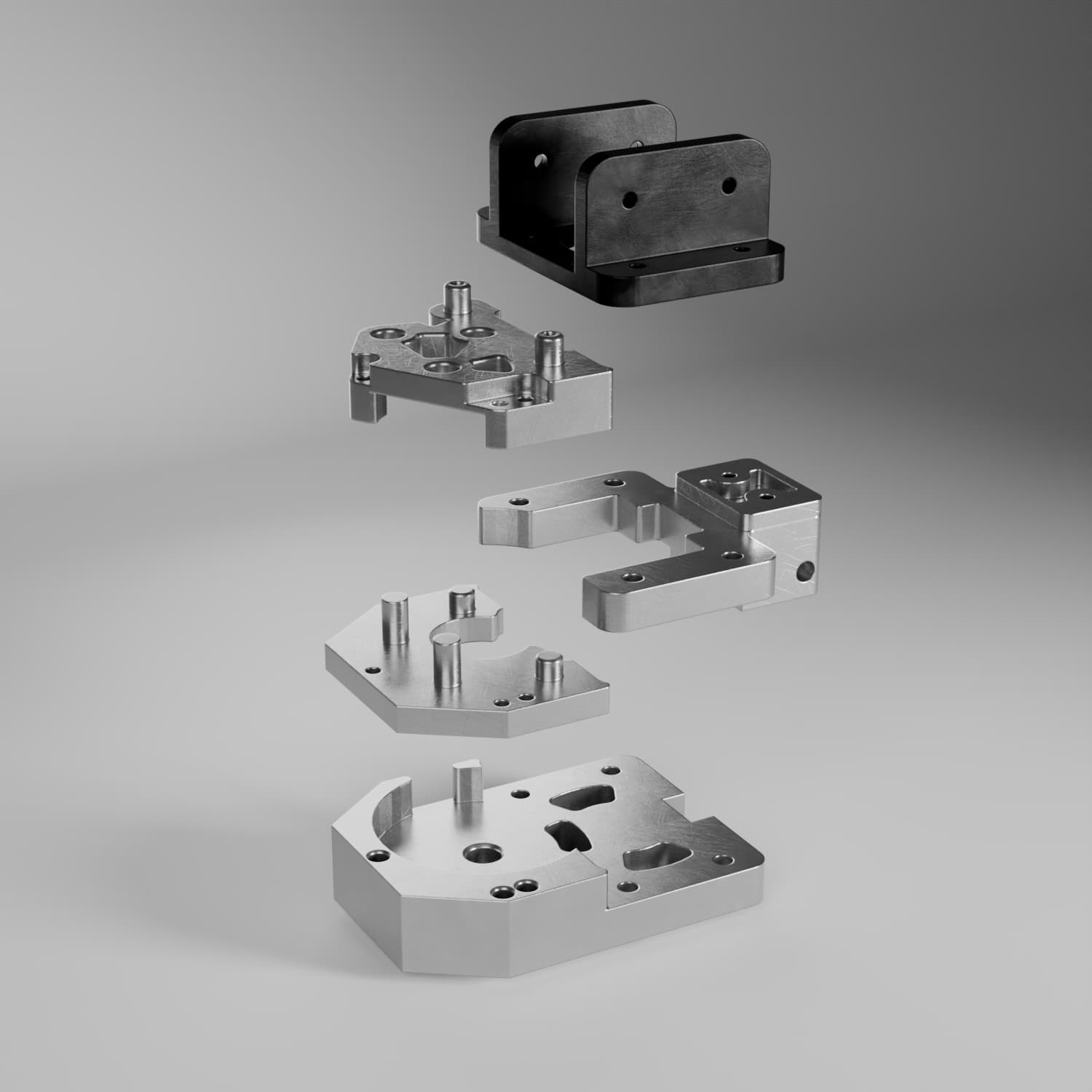
Underwater mechanical general-purpose capturing device as a part of the CUAUVproject team at Cornell University.It uses the SER-2020 servo for actuation, driving a herringbone gear train to power a four-bar linkage mechanism that translate to the opening and closing of the claws, which is designed to be modular to adapt to specific geometries if needed.
Technical Documentation for this project can be found HERE.
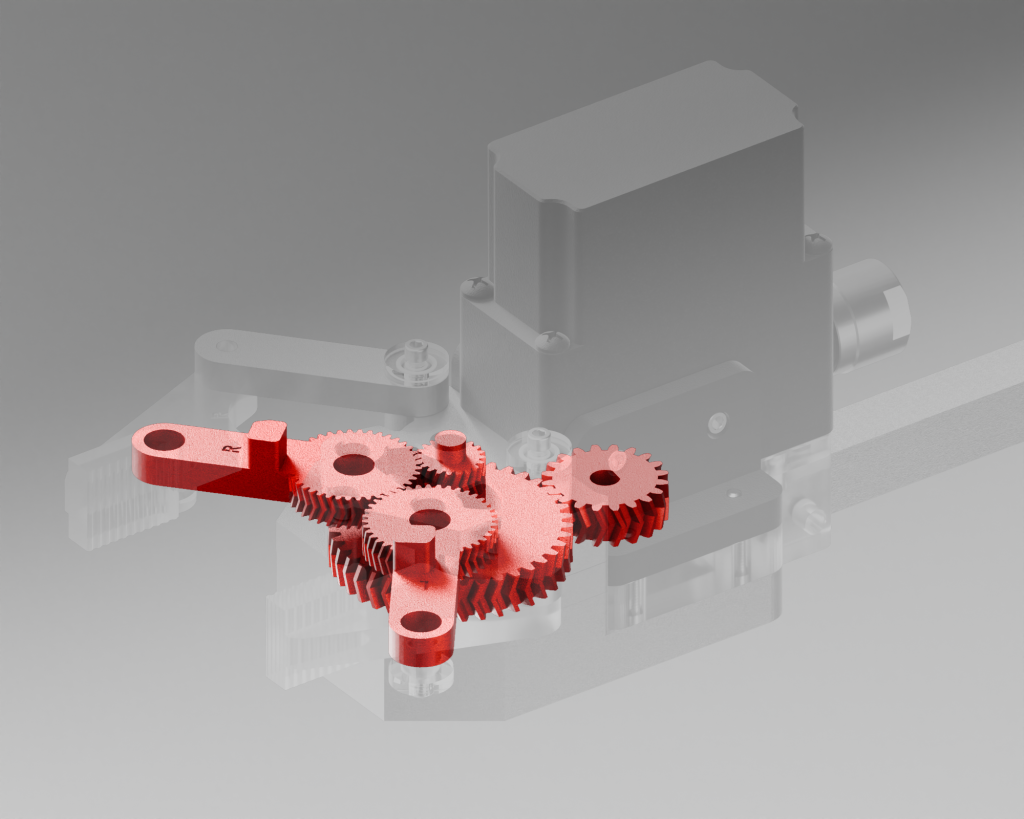
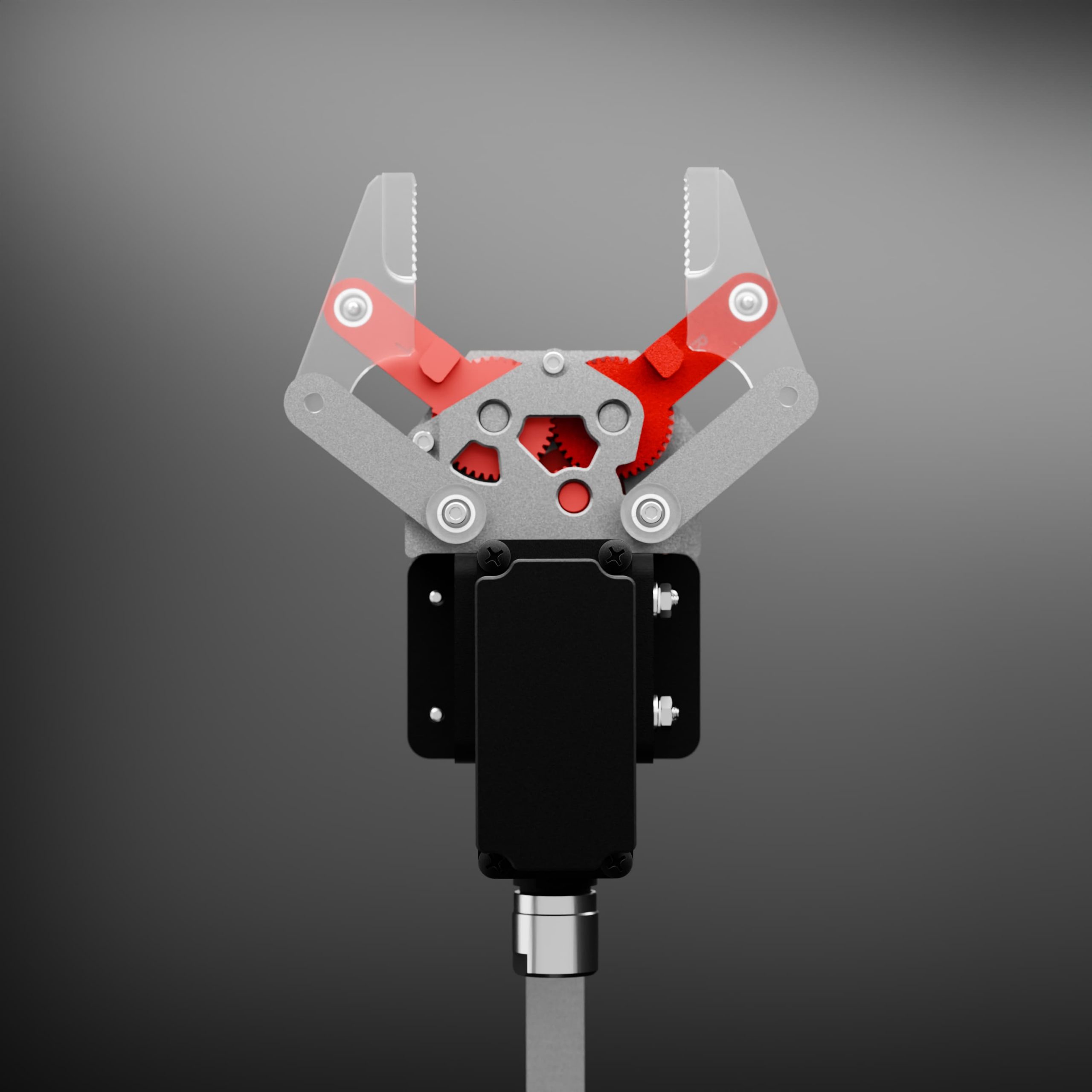
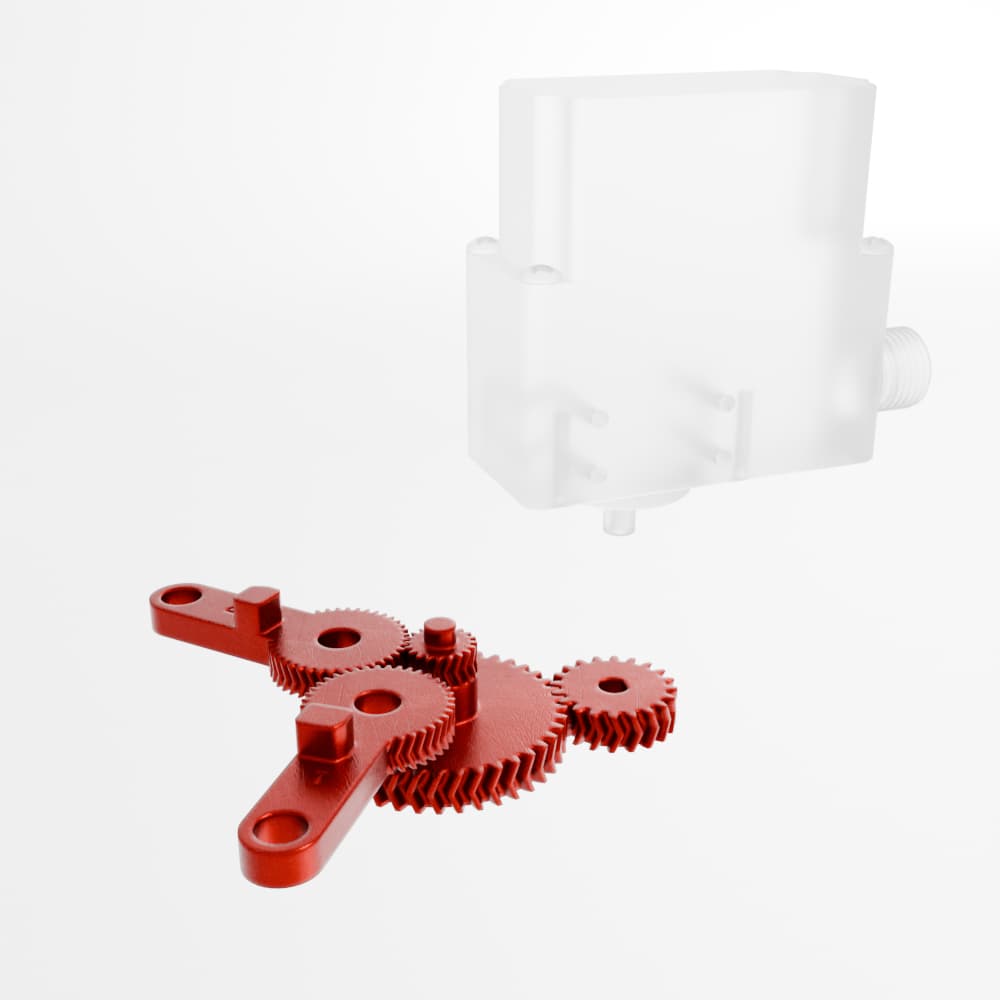
Gear Train
This design resembles a shift of actuation method from pneumatic to servo, calling for a change from linear actuating pattern to a rotational one. Gears are used with a total 4:1 reduction to increase the output torque. Herringbone gear type allows for quieter operation, higher load handling capacity, and self-alining abilities, which is useful in less accurate 3D-print projects.
The intermediate gear is compounded such that it could transmit torque from the lower gear with larger module to the top one. The servo gear is connected via a D shaft.
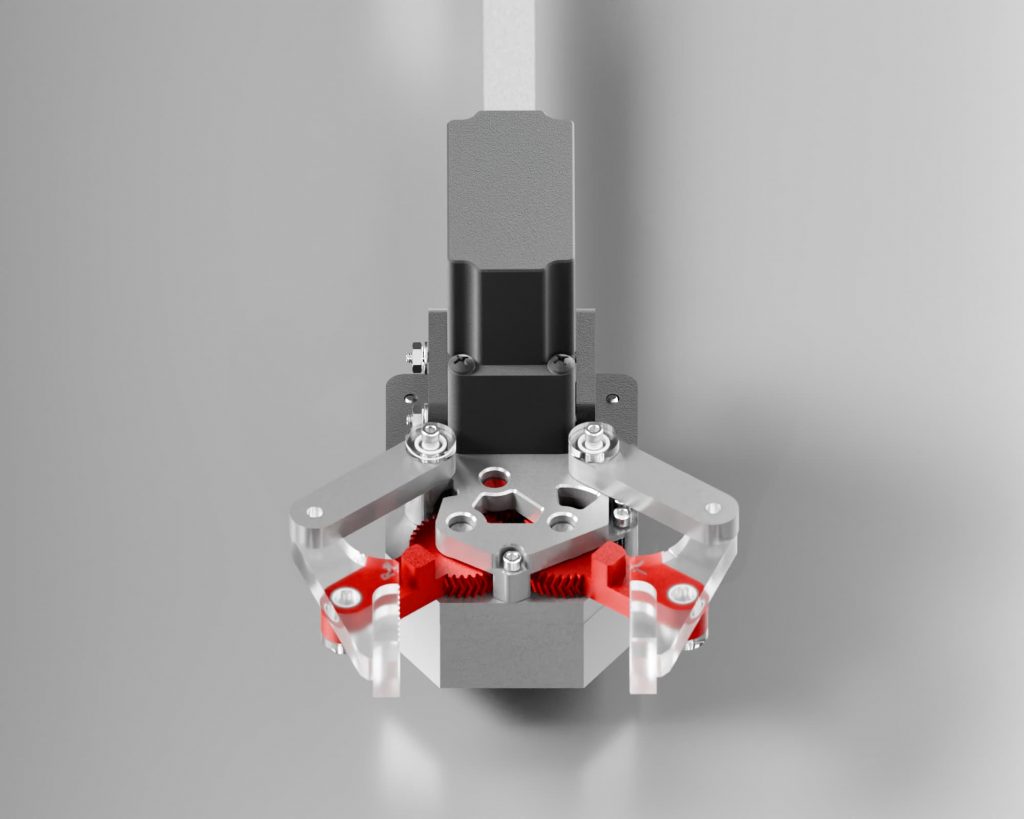
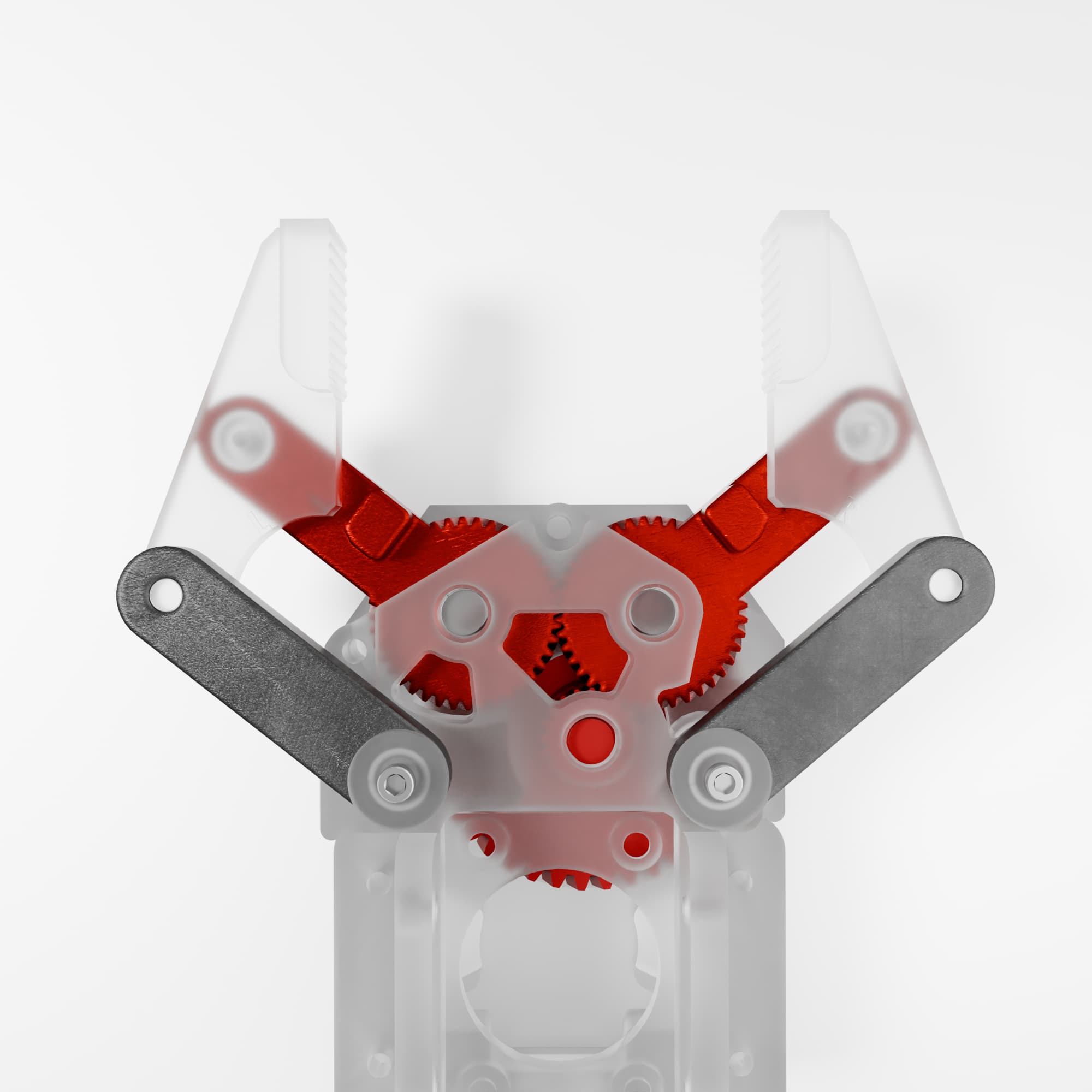
Four Bar Linkage
As reliability is the goal for this project, the four-bar linkage is used as a not-to-complex motion pattern as it is much stiffer than a single pivot actuation.
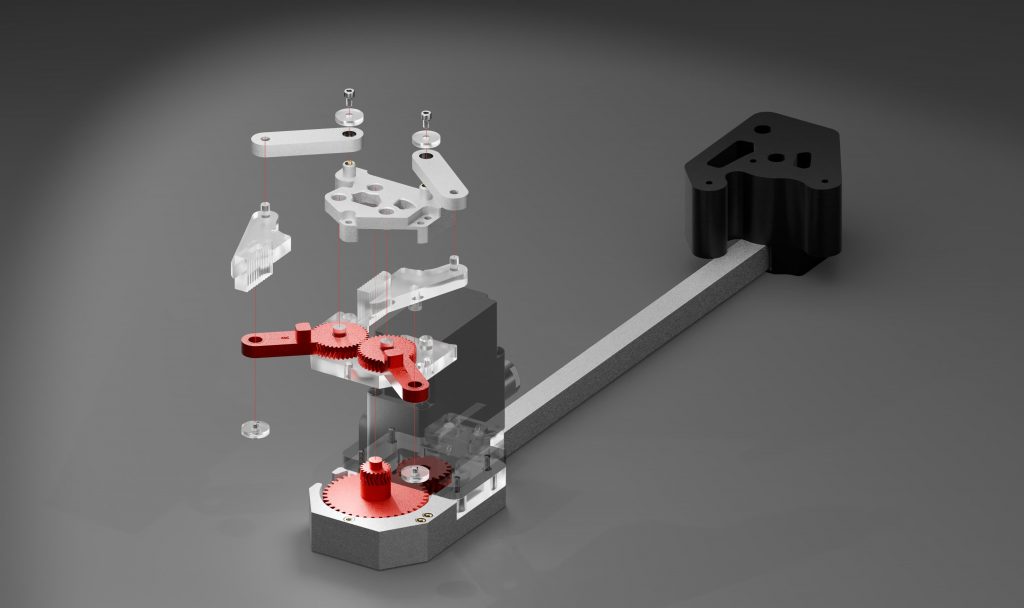
Pivoting connection is achieved with bushing and a 3D-printed top cap secured with a 4-40 socket head screw.