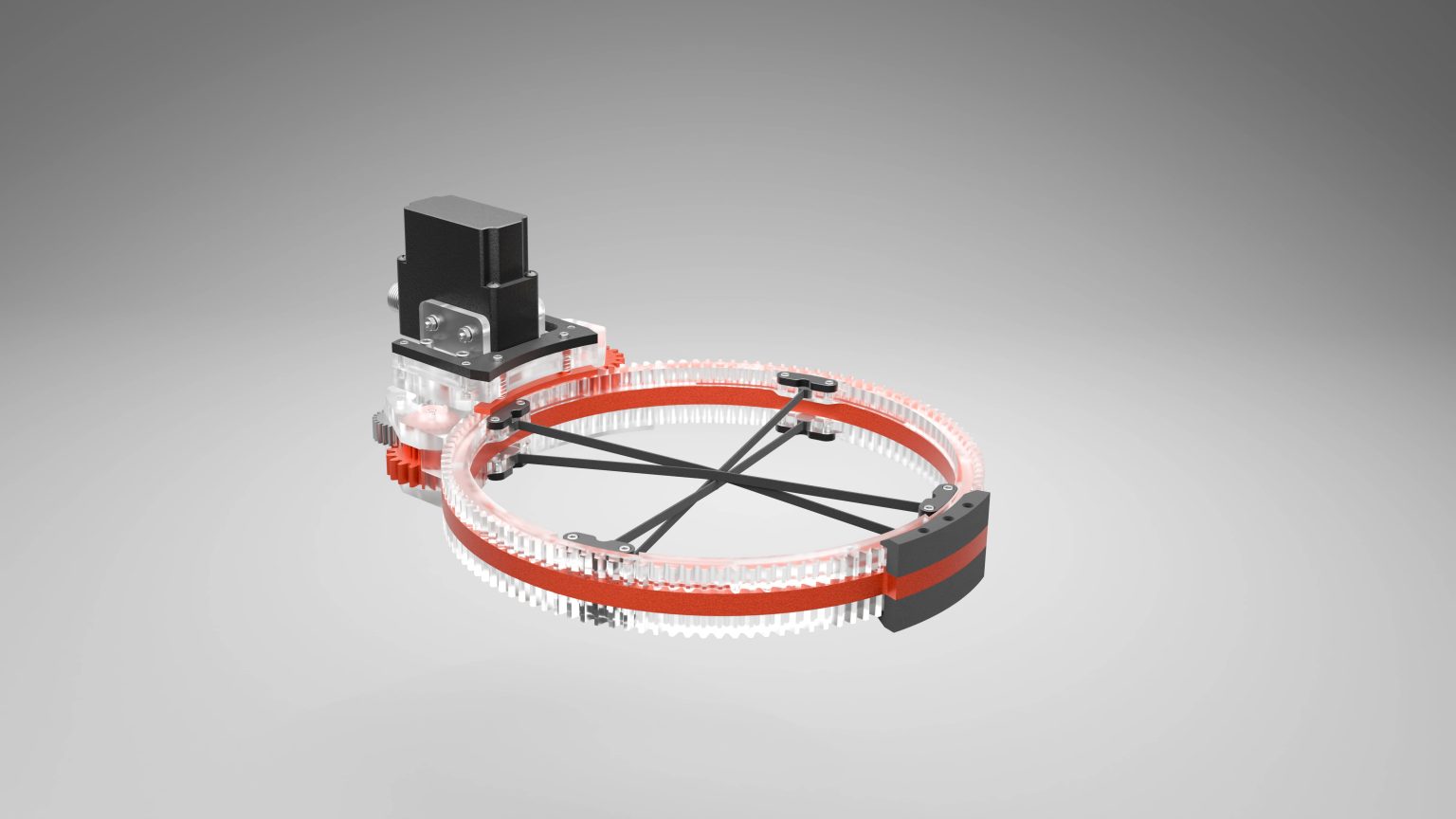
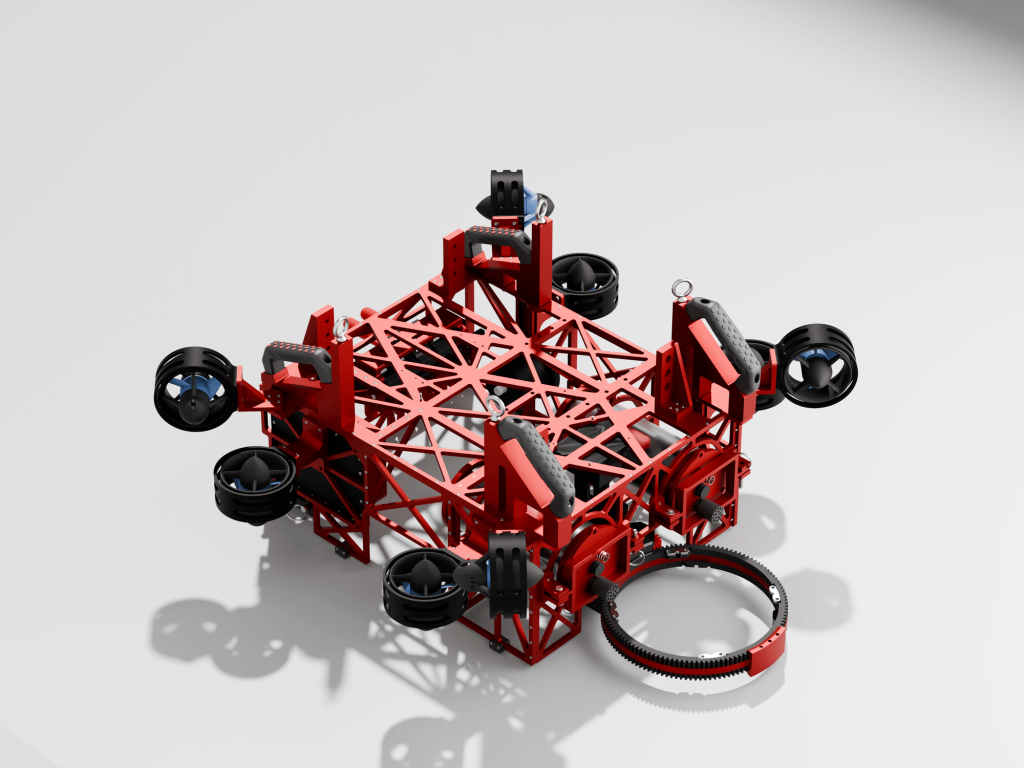
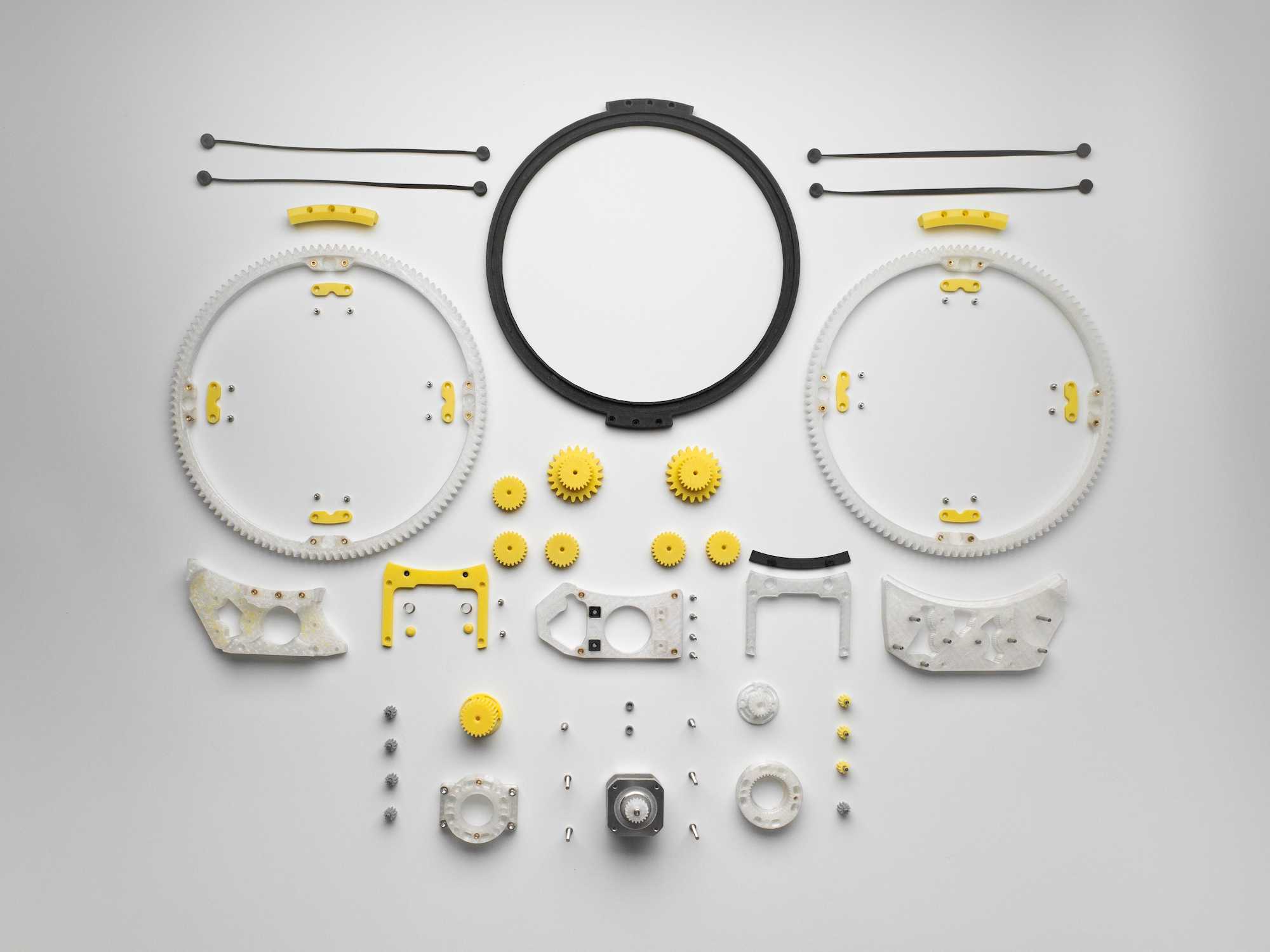
Underwater mechanical manipulator purposely designed to capture and release cylindrical, irregularly shaped objects. A component of CUAUV project team’s submarine at Cornell University.
The SER-2020 servo is used for actuation, driving two sets of outer teeth ring gears and printed TPU stretchies that wrap around the objects.
Technical Documentation for this project can be found HERE.
Orion, 2025 Configuration
The Capturing Process
step 1
The top and bottom clip align. The stretchies form a C-shaped loop and allow objects to penetrate the hoop on the z-axis. No capturing effect and objects would just “slide through”.
step 2
The stretchies start to overlap. As the top and bottom clips start passing through each other in opposite directions, the stretchies form a shrinking aperture and closing toward the target object.
step 3
The stretchies overlap completely, and the normal support force from the object to the stretchies develops static friction, making the object secure on the manipulator. Capturing process completes.
A side-view for step 2, the opening in the center closes up as the two rings continue to rotate
Sandwitch-Pack
Having experienced RoboSub 2024, the importance of being able to disassemble – inspect – fix quickly is well-recognized.
Following experiences from Polaris Manipulator,this project employs a 3-layer-stacking system that is held together with four 4-40 screws.
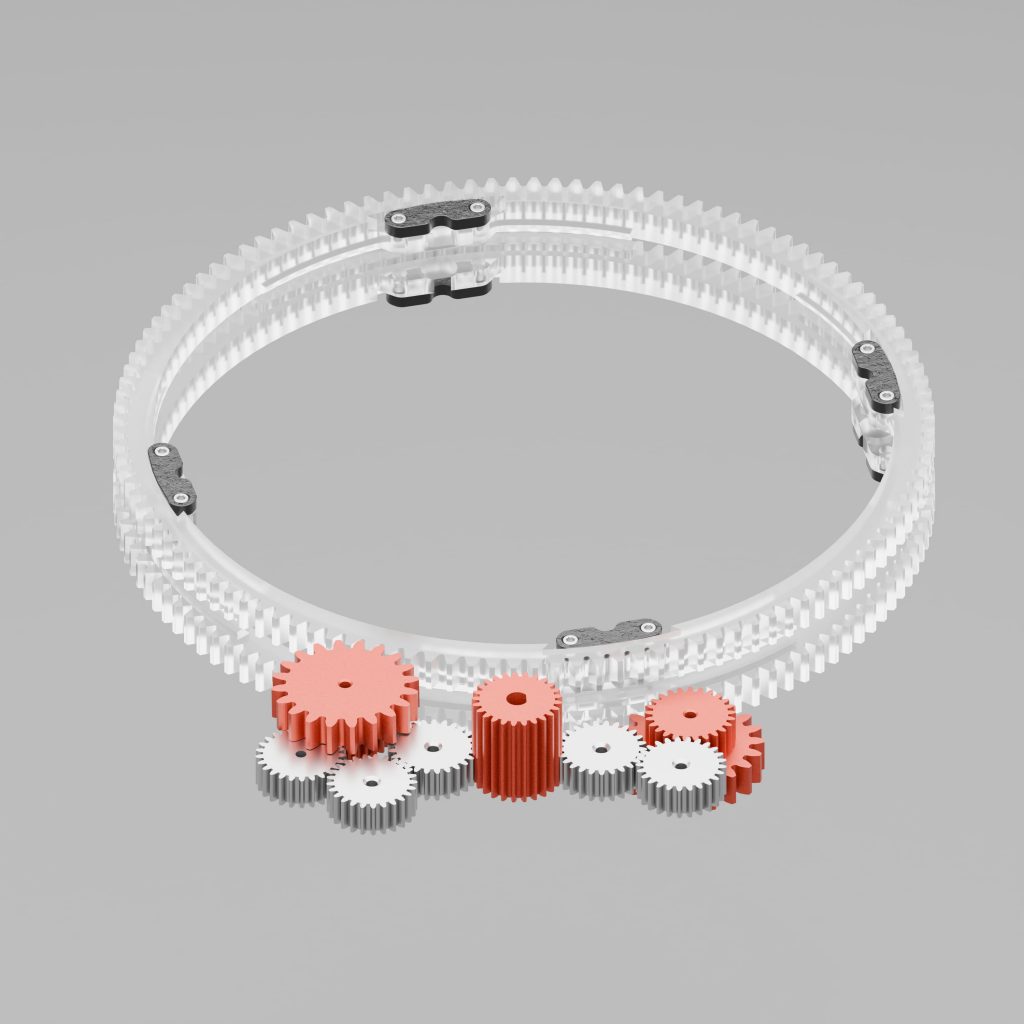
Gear Train
Sirius Manipulator uses the servo gear to drive 2 sets of mirrored gearsets, with one flipped upside down.
Unlike Polaris Manipulator's gears which use print-in-place connectors, Sirius Manipulator uses 304 stainless steel central shafts for every gear as the axis of rotation for better reliability and smoother operation. This avoided failure of gears due to shear force being applied in the interlayer adhesion plane.
Gears are driven by the center servo gear with a D shaft. The left gearset has an additional conveyor gear such that it rotates in the opposite direction of the right gearset, allowing for a more rapid closing motion of the stretchies.
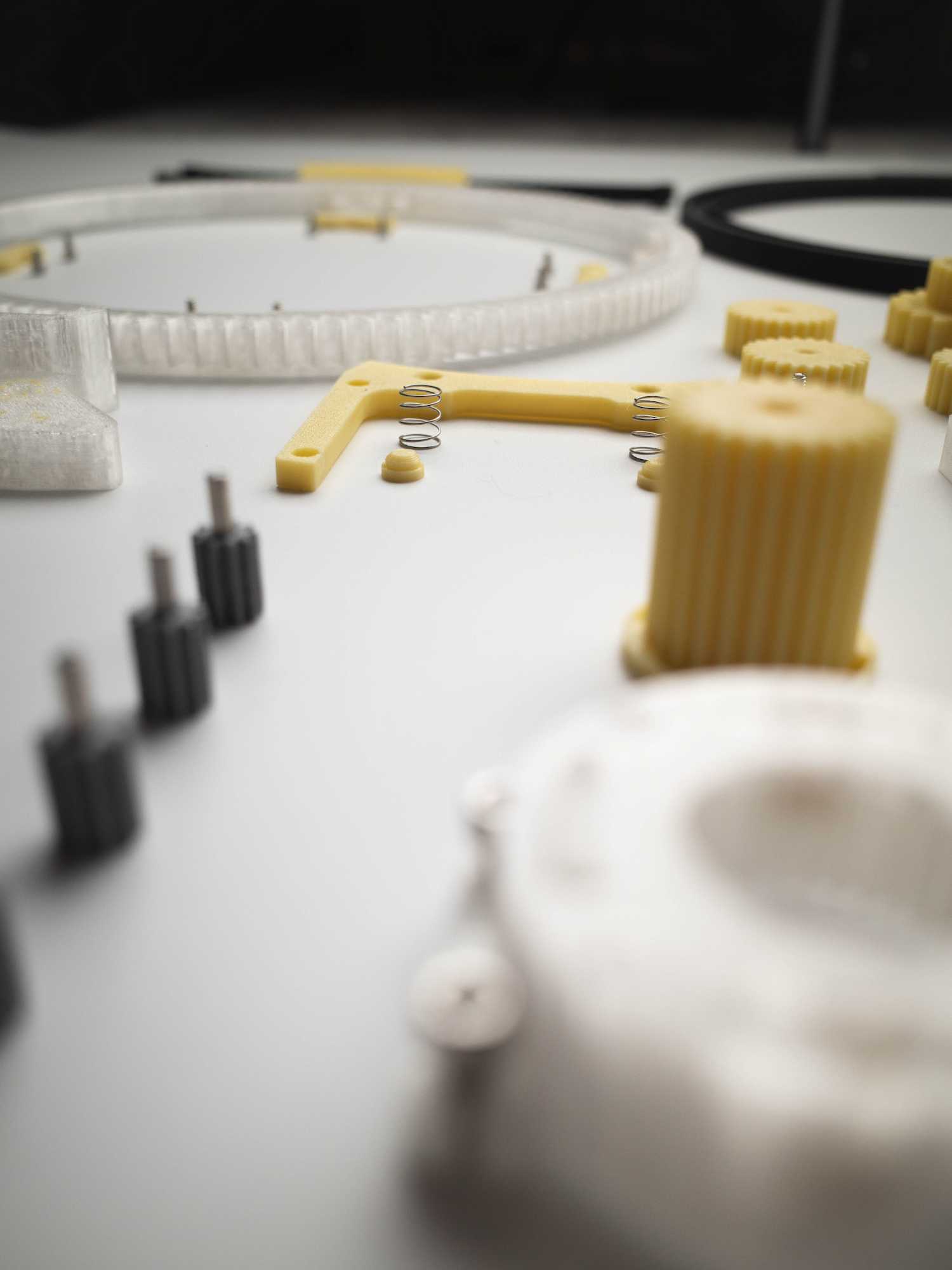
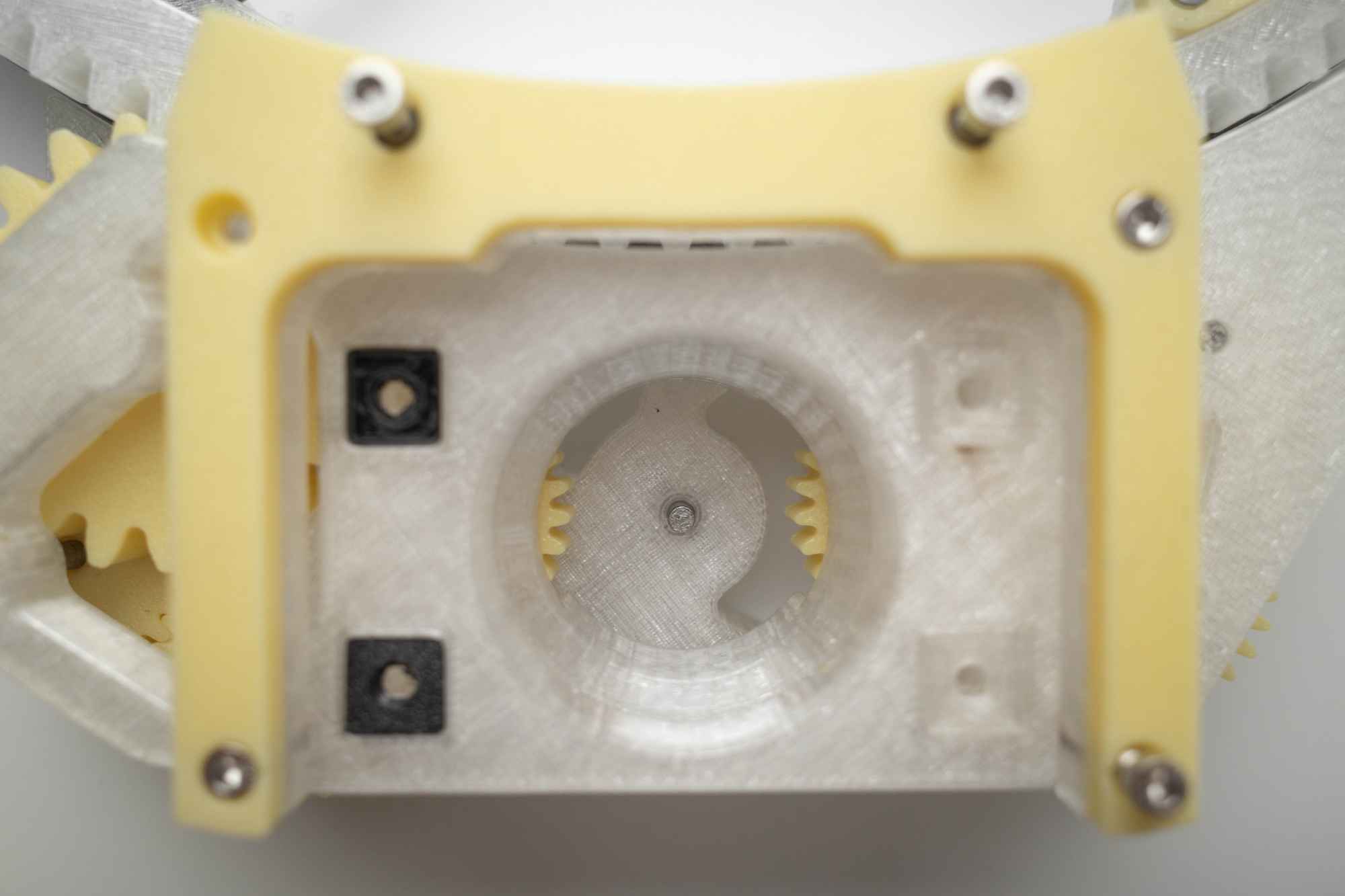
Pressure Assembly
The pressure group assembly aims to provide resistance to prevent the engaged capture state from rotating backward due to the applied tension while the servo does not receive power.
It uses two 4-40 on the top to advance two push-beads which receive the spring and consequently apply pressure to the pressure plate.
When in distress...
Planetary gear to the rescue. It's redundant but too cool to not use.
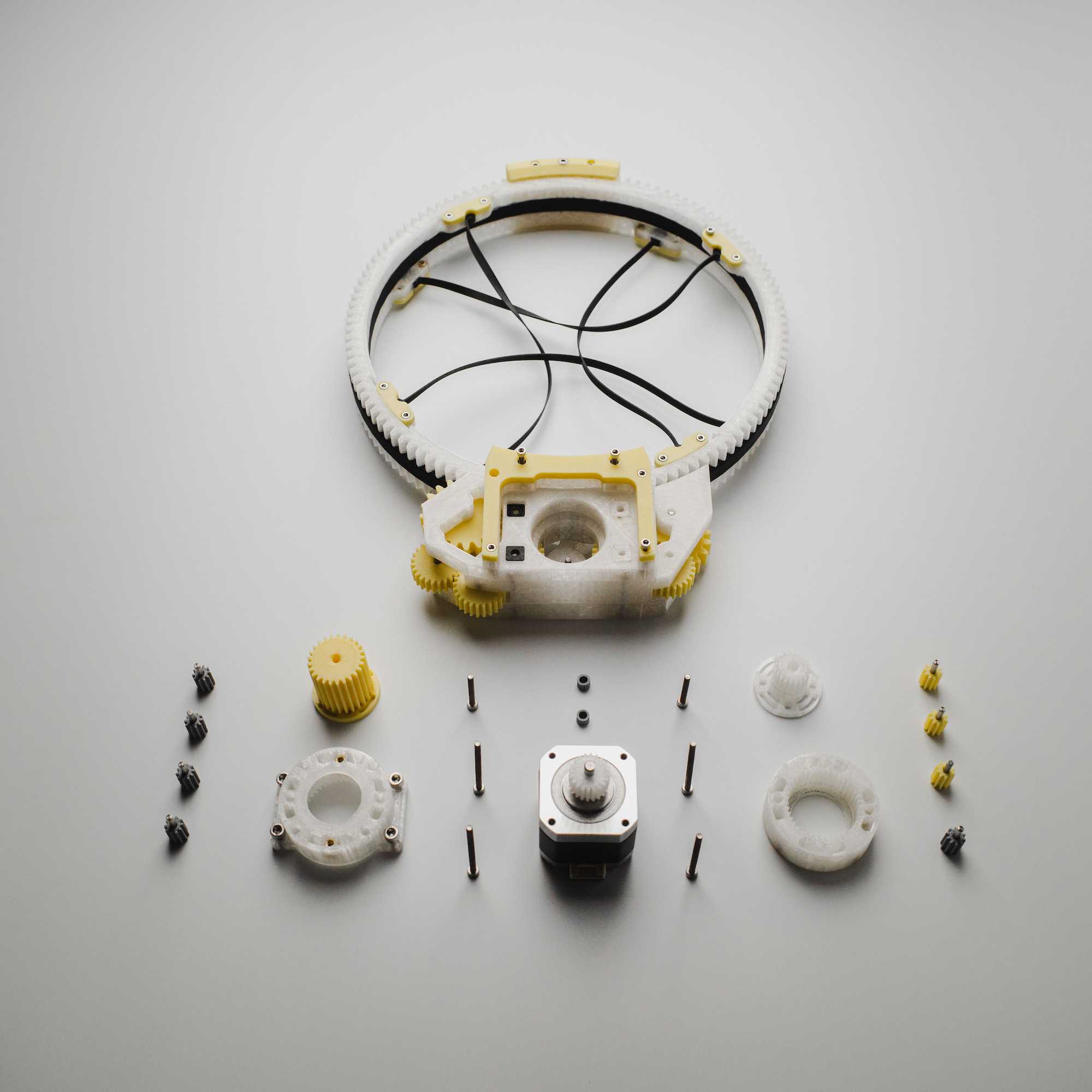
During the initial prototyping stage, as the SER-2020 servo is yet to arrive, and the regular motor does not provide the 3.3Nm of torque, I designed a 2-stage 9:1 planetary gearset to supercharge a NEMA17 stepper motor to fit the need. The identical method with the manipulator of printed hollow gear + 304 pins was used.